Думай иначе. Креативное мышление
Покрытие представляло собой сложную резиновую оболочку толщиной около 2 мм с гладкой наружной поверхностью (рис. 1.13). Внутренняя сторона оболочки множеством расположенных в шахматном порядке резиновых столбиков соединялась с внутренним слоем резины такой же толщины, наклеенным на поверхность корпуса подводной лодки. Пространство между столбиками, представляющее собой множество капиллярных сосудов, заполнялось органической жидкостью с относительно большой вязкостью. По замыслу Крамера, пока режим обтекания в пограничном слое будет ламинарным, покрытие должно вести себя как жесткая поверхность, при этом демпфирующая жидкость находится в покое, а поверхность диафрагмы остается гладкой. При возникновении в пограничном слое колебательных или волновых движений на гребне и впадине волны появится разность давлений, что вызовет распространение волнообразования вдоль покрытия и колебания резиновой оболочки, а через нее и демпфирующей жидкости. При этом турбулизация пограничного слоя должна снижаться, а вернее, переход ламинарного режима обтекания в турбулентный будет отодвигаться в область больших скоростей подводной лодки.
По аналогичному принципу было разработано покрытие «ламинфло», применение которого на торпедах позволило без изменения мощности двигателя существенно увеличить их скорость.
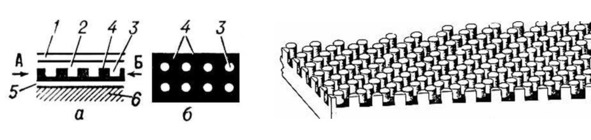
Рис. 1.13. Схема покрытия типа «кожа дельфина»
Искусственная кожа – обшивка «ламинфло»: а – боковой разрез; б – срез через слой палочек по линии АБ; 1 – верхний слой; 2 – средний слой; 3 – гибкие палочки среднего слоя; 4 – пространство между палочками, заполоненное демпфирующей жидкостью (черного цвета); 5 – нижний слой; 6 – корпус модели15
Пример 1.14. Жиротрон
У двукрылых насекомых имеются придатки – жужжальца, которые непрерывно вибрируют вместе с крыльями. При изменении направления полета направление движения жужжалец не меняется, черешок, связывающий их с телом, натягивается, и насекомое получает сигнал об изменении направления полета. На этом принципе построен жиротрон (рис. 1.14) – вильчатый вибратор, обеспечивающий высокую стабилизацию направления полета самолета при больших скоростях. Самолет с жиротроном может быть автоматически выведен из штопора. Полeт насекомых сопровождается малым расходом энергии. Одна из причин этого – особая форма движения крыльев, имеющая вид восьмерки. На рис. 1.14 изображены: а – схема летящей мухи с колеблющимися по обе стороны тела жужжальцами; б – жужжальце; в – схема жиротрона; ток от генератора посылается попеременно то во внешние, то во внутренние электромагниты, что вызывает колебания вильчатого жировибратора16.
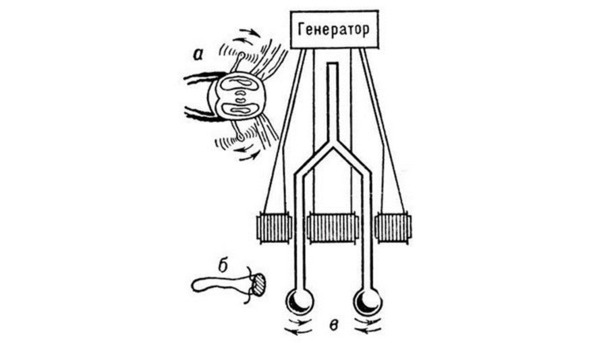
Рис. 1.14. Жиротрона – схема летящей мухи с колеблющимися по обе стороны тела жужжальцами; б – жужжальце; в – схема жиротрона.
Пример 1.15. Эффекта Лотоса
В природе давно подмечен феномен, характерный для листьев цветов лотоса – они никогда не намокают (рис. 1.15а). После дождя или полного погружения в воду они сразу же оказываются сухими и чистыми. На поверхности листьев лотоса вода образует капли, которые, словно шарики ртути, скатываются по поверхности листа, увлекая оказавшиеся на листе инородные частички. Это природное явление получило название «эффекта Лотоса».
Современные исследования выяснили механизм этого эффекта. При 7000-кратном увеличении листа его микроструктура оказалась в виде иголок. Эту структуру воспроизвели при создании краски (рис. 1.15 б).
Создана краска с эффектом Лотоса. Принцип ее действия показан на рис. 1.15 в, а ее эффективность – на рис. 1.15 г.

Рис. 1.15а. Лотос
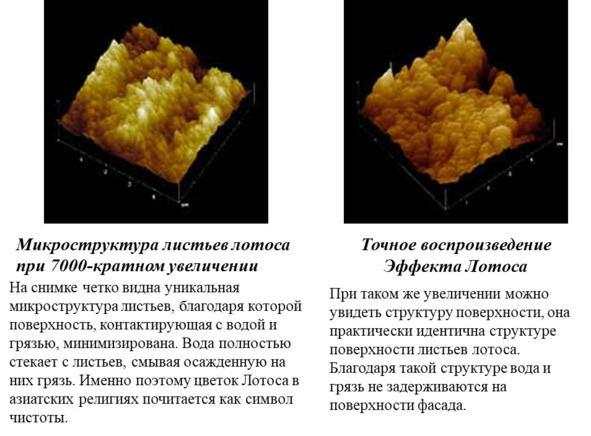
Рис. 1.15б. Микроструктура Лотоса
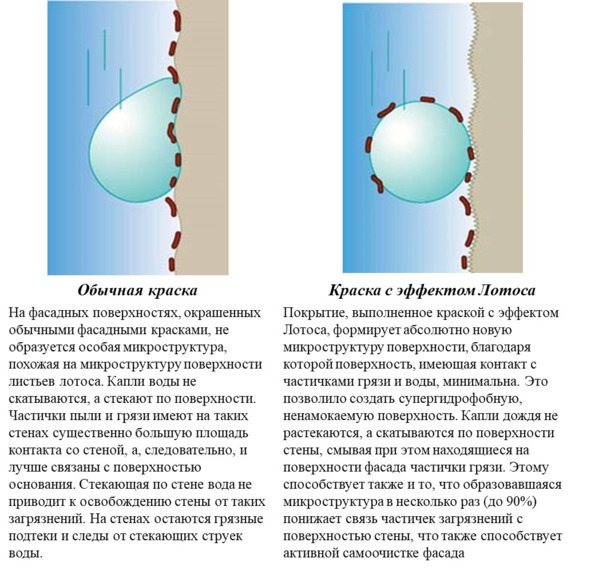
Рис. 1.15в. Принцип действия краски с эффектом Лотоса

Рис. 1.15г. Результаты использования краски с эффектом Лотоса
Пример 1.16. Новые принтеры
По аналогии с поведением стаи термитов, где каждый термит принимает независимые решения, но при этом стая движется к общей цели, например построению гнезда, в исследовательском центре Xerox в Пало Альто разработали новую технологию подающего механизма для копиров и принтеров, названного AirJet. Печатное устройство оснащено множеством воздушных сопел, каждое из которых действует независимо, без команд центрального процессора, однако в то же время они способствуют выполнению общей задачи – продвижению бумаги. В устройстве отсутствуют подвижные части, что позволяет удешевить производство и делает устройство более надежным. Устройство содержит 144 набора по 4 сопла, направленных в разные стороны, а также 32 тыс. оптических сенсоров и микроконтроллеров (рис. 1.16).
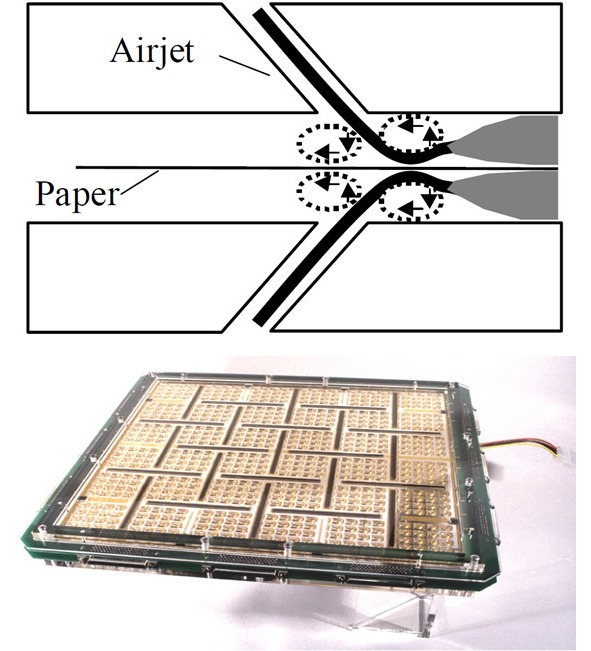
Рис. 1.16. Печатающее устройство Xerox
Пример 1.17. Робомуха
Ученые из Калифорнийского университета в Беркли (University of California at Berkeley) работают над созданием крошечного робота, который имеет массу всего 0,1 грамма. Он может ползать по поверхности и летать (рис. 1.17). Робот имеет миниатюрные полиэстеровые крылья с металлическим каркасом. На крыльях размещены крошечные солнечные батареи. Механический привод позволяет крыльям двигаться со скоростью до 150 махов в секунду: при этом оба крыла могут независимо друг от друга поворачиваться в сторону. Возможная область применения робомухи будет от уничтожения насекомых-вредителей и до промышленного шпионажа. На рис. 1.17 показаны различные конструкции робомух.
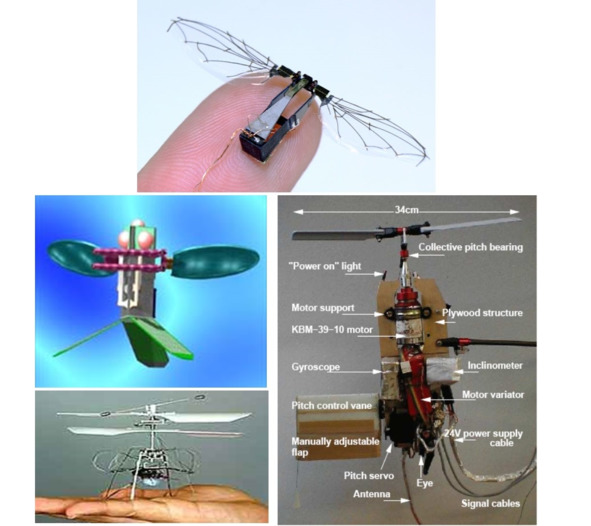
Рис. 1.17. Робомуха
Пример 1.18. Застежка-«липучка»
Швейцарский инженер Джордж де Местраль (Georges de Mestral) в 1955 году, гуляя со своей собакой, заметил, что к ее шерсти постоянно прилипают какие-то непонятные растения. Устав постоянно чистить собаку, инженер решил выяснить причину, по которой сорняки прилипают к шерсти. Исследовав феномен, де Местраль определил, что он возможен благодаря маленьким крючкам на плодах дурнишника (так называется этот сорняк). В результате инженер осознал важность сделанного открытия и через восемь лет запатентовал удобную «липучку» Velcro, которая сегодня широко используется при изготовлении одежды. Застежка-«липучка (репейник)» состоит из двух прочных лент, лицевая сторона одной из которых покрыта петлями из полиамидных мононитей, а лицевая сторона второй – петлями из мононитей с боковым разрезом, т. е. крючками (лента петельная и лента крючковая). При соединении двух лент крючки входят в петли, и происходит быстрое и прочное сцепление. Разъединение двух лент требует значительного усилия (рис. 1.18).
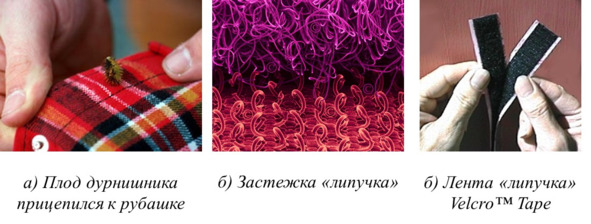
Рис. 1.18. Застежка-«липучка»
Пример 1.19. Глубоководная губка – оптоволокно
Исследователи из Bell Labs (корпорация Lucent) в 2003 году обнаружили в теле глубоководных губок рода Euplectellas (рис. 1.19) высококачественное оптоволокно. Материал скелета этих губок может пропускать цифровой сигнал не хуже, чем современные оптоволоконные кабели, при этом природное оптоволокно значительно прочнее искусственного благодаря наличию органической оболочки. Вторая особенность – это возможность формирования подобного вещества при температуре около нуля градусов по Цельсию, в то время как на заводах Lucent для этих целей используется высокотемпературная обработка. Осталось придумать, как увеличить длину нового материала, поскольку скелеты морских губок не превышают 15 см.
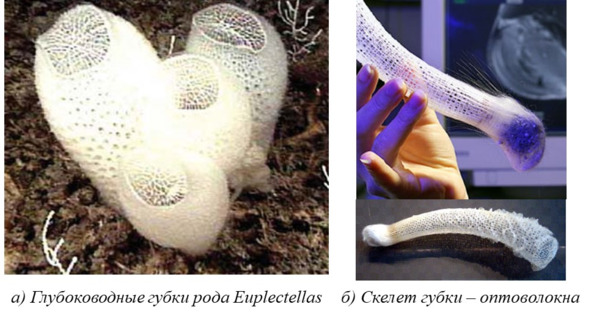
Рис. 1.19. Глубоководная губка – оптоволокно
Пример 1.20. Модель нейрона
Модель нейрона показана на рис. 1.20.
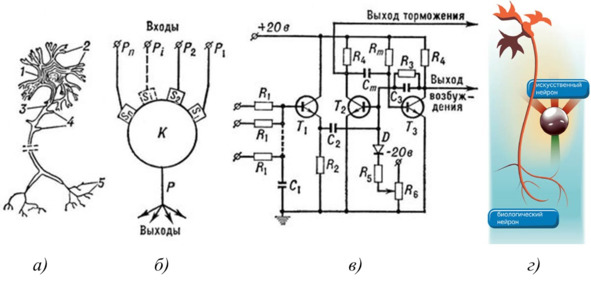
Рис. 1.20а. Схематическое изображение нейрона
а) – изображеие нейрона: 1 – тело клетки; 2 – дендриты; 3- аксон; 4 – коллатерали; 5 – концевое разветвление аксона. б) – модель нейрона: Pn, Pi, P2, P1 – выходы нейрона; Sn, Si, S2, S1 – синаптические контакты; P – выходной сигнал; K – пороговое значение сигнала.
в) – электрическая схема искусственного нейрона: R1 – R6, Rm – сопротивления; C1 – C3, Cm – конденсаторы; T1 – T3 – транзисторы; D – диод.
г) рисунок биоогического и искусственного нейрона.
С каждым годом появляется все больше патентов на нейронные сети, например, патент США US 9 842 585 B2 компании Microsoft от 12.12.2017.
Компания Google разработала нейрочип Tensor Processing Unit (TPU) отвечающий за идентификацию объектов и лиц на фотографиях, распознавание голоса на Android-смартфонах, а также перевод текста с одного языка на другой.
Пример 1.21. Автомобиль без водителя
Американская компания Orbital Research создала действующую модель радиоуправляемого авто с «тараканьими мозгами» (рис.1.21). Это интуитивная сенсорная система, позволяющая избежать столкновений автомобилей на земле и самолетов в воздухе. Систему назвали Bio-Avert. Она разработана по аналогии с нервной системой тараканов и моделирует поведение тараканов в тот момент, когда их пытаются поймать.
Оказалось, что у тараканов уникальная нервная система. Она без отдыха контролирует мельчайшие изменения, происходящие рядом, и при возникновении опасности реагирует быстро, четко и, самое главное, правильно.
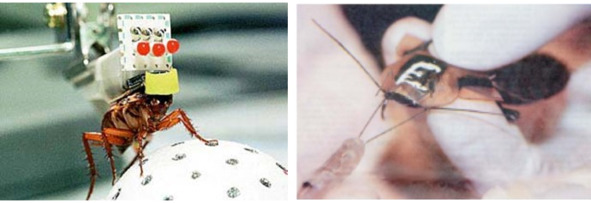
Рис. 1.21. Нервная система тараканов
Пример 1.22. Кожа для роботов
Японские ученые по аналогии с естественной кожей изобрели искусственную кожу для роботов. Это может стать первым шагом на пути к полноценному осязанию роботами окружающего мира (рис. 1.22).
«Кожу», которая способна чувствовать давление и температуру, можно обернуть вокруг механических пальцев андроидов. Причем, как утверждают ученые, их разработка не будет обходиться дорого.
«Кожа» состоит из двух слоев – один для регистрации давления, и другой – для регистрации температуры.
Именно совмещение этих двух слоев стало революционным прорывом в работе над андроидами.
Японские ученые использовали электронные схемы в качестве датчиков давления и полупроводники в качестве датчиков температуры. Эти датчики помещены в тонкий слой пластика, который можно обернуть вокруг робота.
Транзисторы и полупроводники, которые использовали для электронной «кожи» ученые, основаны на органических материалах, состоящих из цепочек атомов углерода.
Это придает электронным схемам гибкость и делает процесс изготовления «кожи» относительно дешевым.
Ученые надеются, что их разработка поможет улучшить эффективность работы роботов. Более того, исследователи говорят, что не намерены останавливаться на том, чтобы просто воспроизвести функции человеческой кожи.
«Возможно, в ближайшем будущем появится электронная „кожа“, которая превзойдет по своим свойствам человеческую», – пишут в своей работе ученые.
Будущая искусственная кожа сможет иметь датчики не только для регистрации давления и температуры, но и для света, натяжения, звука и влажности.
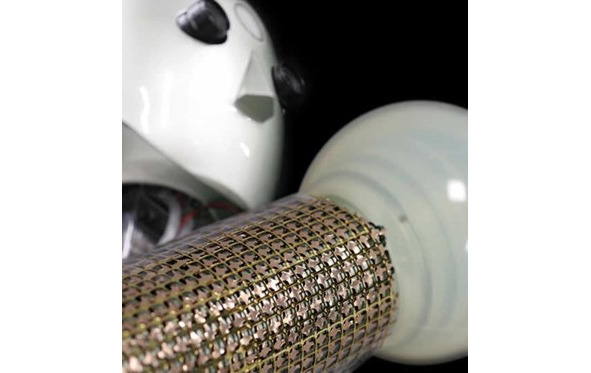
Рис. 1.22. Кожа для робота
Пример 1.23. Глаз насекомого
В Университете Беркли разработали первый «фасеточный» объектив для фотокамеры, который воспроизводит устройство глаза насекомых. Объектив склеен из 8500 шестиугольных микролинз, а его поле зрения больше, чем у традиционных «широкоугольников». Диаметр устройства – 2,5 миллиметра, и теперь главная проблема заключается в том, чтобы изготовить электронную матрицу подходящих размеров и формы.
В отличие от высших животных, насекомые (рис.1.23а) лишены сетчатки. Каждой фасетке (то есть «линзе») глаза соответствует отдельный рецептор, фиксирующий яркость (и, возможно, другие характеристики света), но не детали (рис.1.23б). Целостное изображение складывается из «пикселей», переданных рецепторами, и поэтому разрешающая способность глаза очень высока.
В искусственном «глазе» стеклянные микролинзы покрывают полусферу из эпоксидной смолы, внутри которой проходят микроканалы-волноводы – они заменяют нервные волокна насекомого, передающие оптический сигнал от каждой фасетки мозгу (рис.1.23в). Изготовление волноводов и было самой нетривиальной частью задачи. Для этого сплошную «заготовку» объектива пришлось облучать ультрафиолетовым светом – чтобы, преломляясь в линзах, свет проделал каналы, подходящие в точности к каждой из них.
Конец ознакомительного фрагмента.
Текст предоставлен ООО «Литрес».
Прочитайте эту книгу целиком, купив полную легальную версию на Литрес.
Безопасно оплатить книгу можно банковской картой Visa, MasterCard, Maestro, со счета мобильного телефона, с платежного терминала, в салоне МТС или Связной, через PayPal, WebMoney, Яндекс.Деньги, QIWI Кошелек, бонусными картами или другим удобным Вам способом.
Примечания
1
Аналогия – материал из Википедии.
2
Бионика – материал из Википедии.
3
Manuscript, folio 88 v. Leonardo da Vinci. Манускрипт «B» Леонардо да Винчи, 168 с., военные сооружения, архитектура. Во всеx рукописях пронумерованы листки; поэтому страницы обозначаются добавлением r (recto) или v (verso).
4
Codex «On the Flight of Birds» (V.U.) 17 r. «Трактат о полете птиц» включает 17 стр. (размеры 21 x 15 см), в оригинале 18 стр. В манускрипте произведен широкий анализ полета птиц, уделено внимание механике полета, воздушному сопротивлению и воздушным потокам.
5
Codex Atlanticus, folio 844. Leonardo da Vinci. Codex Atlanticus (Атлантический кодекс). Drawing from Il Codice Atlantico di Leonardo da Vinci nella biblioteca Ambrosiana di Milano, Editore Milano Hoepli 1894—1904. The original drawing is kept in the Biblioteca Ambrosiana in Milan (Editore Milano Hoepli 1894—1904).
6
Codex Atlanticus. 381 v. Leonardo da Vinci
7
Manuscript B, folio 83 v. Leonardo da Vinci
8
Manuscript В. 83 v. Leonardo da Vinci
9
V.U. 8 r. Leonardo da Vinci
10
V.U. 16 r. Leonardo da Vinci
11
V.U. 6 r. Leonardo da Vinci
12
Codex Atlanticus, folio 1058. Leonardo da Vinci
13
Codex Atlanticus 381 v. а. Leonardo da Vinci
14
Омматидий (от греч. ōmma, род. падеж ōmmatos – глаз), структурная и функциональная единица фасеточного глаза насекомых, ракообразных и некоторых многоножек. Состоит из линзы с неизменным фокусным расстоянием, образующей фасетку глаза, т. н. кристаллического конуса и воспринимающей группы светочувствительных клеток с нервными отростками, дающими начало нервному волокну. Количество омматидий в таком глазу различно: от ста (у рабочего муравья) до 28 тыс. (у стрекозы). Фасеточный глаз специализирован для восприятия движения (острота зрения и способность к восприятию формы предмета у него развиты слабо) и обеспечивает очень широкое поле зрения (у саранчи каждый омматидий имеет угол зрения в 20°). Таким образом, любое движение врага или добычи мгновенно улавливается хотя бы одним из омматидий.
15
Бионика – БСЭ URL: http://dic.academic.ru/dic.nsf/bse/69413/%D0%91%D0%B8%D0%BE%D0%BD%D0%B8%D0%BA%D0%B0
16
Бионика – БСЭ URL: http://dic.academic.ru/dic.nsf/bse/69413/%D0%91%D0%B8%D0%BE%D0%BD%D0%B8%D0%BA%D0%B0
Вы ознакомились с фрагментом книги.
Для бесплатного чтения открыта только часть текста.
Приобретайте полный текст книги у нашего партнера:
Всего 10 форматов