Avtomatlashtirishning texnik vositalari. O’quv qo’llanma
Nazorat savollari
1. Avtomatlashtirilgan tizimlarni boshqarish tizimi qanday shakllantiriladi?
2. Boshqarish tizimi qanday qurilmalardan iborat?
3. Avtomatlashtirilgan tizimlarni samaradorligi nimalardan iborat?
4. Samaradorlik bilan sarf qanday bog‘langan?
II BOB. AVTOMATIK BOSHQARUV TUZILMALARI STRUKTURASI
2.1. ABT ning maqsadi, funksiyalari va vazifalari
Boshqarish bu – obyektning holati to‘g‘risidagi ma’lumotlarga asoslangan, faoliyat ko‘rsatish maqsadiga muvofiq obyektning ishlashini saqlash yoki yaxshilashga qaratilgan harakatlar majmuini tanlashdir.
ABT texnologik boshqaruv obyektida boshqaruv harakatlarini ishlab chiqish va amalga oshirish uchun mo‘ljallangan. ABT faoliyatining maqsadi texnologik jarayonni bir qator aniq mezonlar bo‘yicha optimallashtirishdir.
ABT funksiyalarining uchta asosiy sinfi mavjud.
Boshqarish funksiyalari:
– texnologik o‘zgaruvchilarni og‘ish orqali tartibga solish (teskari aloqa bilan tizimlar tomonidan amalga oshiriladi);
– uskunalar guruhini mantiqiy boshqarish;
– optimal boshqarish (boshqaruv obyekti jarayonlari parametrlari bo‘yicha belgilangan maqsad funksiyasining ekstremumiga erishish uchun amalga oshiriladi);
– adaptiv boshqaruv (texnologik jarayon parametrlari o‘zgarganda avtomatik boshqaruv tizimining parametrlari o‘zgaradi).
Axborot funksiyalari:
– axborotni to‘plash, qayta ishlash va uzatish;
– texnologik parametrlarni markazlashtirilgan nazorat qilish va o‘lchash;
– jarayon parametrlarini (holat o‘zgaruvchilari va boshqalar) bilvosita o‘lchash (hisoblash);
– operativ xodimlarga ma’lumotlarni shakllantirish va berish;
– tegishli boshqaruv tizimlariga ma’lumotlarni tayyorlash va uzatish.
Ikkilamchi funksiyalar:
– ABT apparat va dasturiy ta’minotiga texnik xizmat ko‘rsatish va nazorat qilish
Nazorat savollari
1. Avtomatlashtirishning maqsadi nimada?
2. Avtomatlashtirishning funksiyalarini sanab o‘ting.
3. Avtomatlashtirishning axborot funksiyalari nimada?
4. Axborot funksiyalarini sanab bering.
2.2. ABT sinflari
ABT quyidagi sinflarga bo‘linadi:
– Lokal boshqaruv tizimlari;
– markazlashtirilgan boshqaruv tizimlari;
– taqsimlangan boshqaruv tizimlari.
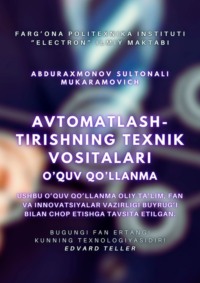
Barcha murakkab tizimlarning ajralmas qismi bo‘lgan eng oddiy tuzilma (2.1-rasm) teskari aloqaga ega bo‘lgan avtomatik lokal boshqaruvchi (masalan, turbinaning tezligini boshqaruvchi).
2.1-rasm. Lokal regulator va obyektning sxemasi: a – teskari aloqa omili; BR – boshqaruv bloki yoki Lokal regulator
Sensor tomonidan aylantirilgan obyekt haqidagi chiqish ma’lumotlari taqqoslash elementiga beriladi. Belgilangan nuqtadan va sensor chiqishidagi signallar o‘rtasidagi farq boshqaruv xatosi signalini hosil qiladi, unga ko‘ra boshqaruv bloki ishlaydi va obyektga boshqaruv signalini hosil qiladi.
Nazorat maqsadi: belgilangan funksiyaning samaradorligini oshirish uchun obyektning ishlashini tartibga solish uchun minimal xato va maksimal tezlik bilan erishish. Maqsadga lokal regulator yordamida erishiladi. Ko‘pincha, lokal boshqaruvchining yagona konstruktsiyasida nazorat qilish maqsadida signallarni qabul qilish, uzatish va o‘zgartirishning barcha funksiyalarini bajarish vositalari birlashtirilgan.
Boshqarishda ishonchlilik hali ham asosiy boshqaruv tizimlarida «muhim chegara» sifatida e’tiborga olinadi. Lokal ABT sxemasi yuqorida keltirilgan (2.2-rasm).
Lokal ABT ning blok sxemasi rasmda ko‘rsatilgandek (2.2. rasm) berk bo‘lgan elementlar yig‘indisidan iborat rostlash qurilmasiga ega klassik tizimdir. Sxemada nuqtali o‘qlar qaror qabul qiluvchiga aloqa qurilmalari va qo‘lda boshqarish orqali to‘g‘ridan-to‘g‘ri ijro etuvchi qurilmaga harakat qilish imkonini beruvchi yo‘lni ko‘rsatadi. Zaryriy holatlarda qo‘lda boshqarish qo‘llaniladi:
– favqulodda vaziyatlarni hal qilish;
– boshqariladigan obyektda katta o‘zgarishlarga yo‘l qo‘ymaslik.
Bunday holda, qo‘lda boshqarish yuqori ishonchlilik koeffitsientiga ega bo‘lishini ta’minlaydi.

2.2 – rasm. Lokal ABT ning strukturaviy diagrammasi.
AQ- interfeys yoki aloqa qurilmasi (Ethernet, RS-485 interfeysi va boshqalar), QB- qo‘lda boshqarish, BQ- bajarish qurilmasi, TBO- texnologik boshqarish obyekti, D- datchik, LR- local rostlagich (kontroller), O- operator (texnolog). LR – lokal kontroller, odatda bir nechta kirish va chiqishlarga ega (sensorlar va sensorlarni normallashtirish, kompyuterdan ma’lumotlarni uzatish, belgilangan parametrni sozlash). U boshqarish tizimini asosiy elementi hisoblanadi.
Avtomatlashgan tizimlar sxemasini quyidagicha ifodalash mumkin:

2.3 – rasm. Avtomatik boshqarish tizimining blok sxemasi
2.2.1. Markazlashtirilgan ABT
Markazlashtirilgan ABT bir kanalli (2.3-rasm) va ko‘p kanalli (2.4-rasm) bo‘lishi mumkin. Raqamlardagi ovallar ko‘p yadroli aloqa kanallarini ko‘rsatadi.
Markazlashtirilgan yagona kanal tizimi
Tizim shunday tuzilganki, barcha qarorlar datchiklar va bajarish qurilmalari bilan bitta aloqa kanali orqali ulangan yagona markaziy boshqaruv organi tomonidan qabul qilinadi. Bunday tuzilma tarihan rivojlangan bo‘lib, uning mafkurasi asosan qo‘l tizimlarini takrorlaydi, masofadan boshqarish pulti bilan. Boshqaruv obyekti va u bilan bog‘liq hal qilinishi kerak bo‘lgan muammolar murakkablashishi bilan aloqa kanali orqali axborot oqimi kuchayadi. Tizimning ma’lum darajada murakkabligidan boshlab, markaziy boshqaruvchining imkoniyatlari yetarli bo‘lmasligi mumkin. Bu esa tizimga ko‘p kanalli markazlashgan ko‘p kanalli texnologiyalarni qo‘llashga olib keladi.
2.4- rasm.Markazlashgan avtomatik boshqarish tizimining blok sxemasi

2.5 – rasm. Bir kanalli tizimning funksional sxemasi: SNQ- signal berish, nazorat qurilmasi, TQ- topshiriq (zadaniya) berovchi qurilma, MP- markaziy pult, IQ» – ikkilamchi o‘zgartirgich, MB- masofadan boshqarish, MKB- mantiqiy komandali boshqarish, LR- local rostlagich, BQ- boshqarish qurilmasi, BM- boshqarish mexanizmi, TBO- texnologik boshqarish obyekti, D- datchik.
Markazlashtirilgan ko‘p kanal tizimi
Ko‘p kanalli ABTda markaz to‘g‘ridan-to‘g‘ri ABT ishlashiga ta’sir qiluvchi ko‘plab texnologik zanjirlarning fikr-mulohazalarini nazorat qiladi. Kanal boshqaruvchisi ma’lumotni ko‘p qatorlarga ajratadi. Kanal kaliti ma’lumotni bir qatorga «hatlash» uchun ishlatiladi.
Ma’lumotni uzatish uchun ko‘plab kanallar mavjud bo‘lganda, natijada ko‘plab fizik ulanishlar mavjud. Biroq, simli liniyalar kabi ulanishlar soni bo‘yicha cheklovlar mavjud. Aloqa vositalariga texnik cheklovlar va kanallar soni bo‘yicha iqtisodiy cheklovlar mavjud.
Shuning uchun kanallarni multiplekslash qo‘llaniladi (vaqt yoki chastota bo‘yicha). Ko‘p kanalli ABT da ikkita ma’lumot oqimini ajratish mumkin: obyektdan va obyektga. Markaziy protsessor (CPU) butun tizimning markazidir. Biz protsessor to‘g‘ridan-to‘g‘ri nazorat qiladi, yoki obyektga ta’sir qiladigan impulslar ishiga halaqit beradi deb taxmin qilinadi.
Markazlashtirilgan ko‘p kanalli avtomatlashtirilgan tizimga quyidagini misol qilish mumkin:
rasm.Markazlashtirilgan ko‘p kanalli avtomatlashtirilgan tizim
Keltirilgan blok sxemada ko‘p kanalli makazlashgan boshqarish tizimi ifodalangan. Boshqarish bloki sifatida kompyuter foydalanilgan.
2.2.2. Taqsimlangan boshqarish tizimlari
Zamonaviy boshqarish tizimlarini asosiy qismlarini taqsimlangan boshqarish tizimlari tashkil etadi. Taqsimlangan boshqarish tizimlarida boshqarish obyektidagi boshqarish nuqtalari (boshqarish parametrlari) xarakteriga qarab taqsimlanib, turli boshqarish kontrollerlariga bog‘laniladi. Kontrollerlar yuqori boshqarish blokidan olingan «topshiriq» asosida o‘ziga bog‘langan texnologik parametrlarni nazorat qiladi va boshqaradi. Taqsimlangan boshqarish tizimiga quyidagi blok sxemani misol qilish mumkin:
1. Avtomatlashtirilgan tizimlar qanday bo‘limlardan iborat bo‘ladi?
2. Chiziqli boshqarish tizimlari qayerlarda qo‘llaniladi?
3. Lokal boshqarish tizimlari nima?
4. Markazlashgan boshqarish tizimlari nima?
5. Taqsimlangan tizimlarni tushuntiring.
6. Obyekt deganda nima tushuniladi?
2.3. Texnologik jarayonlarni avtomatlashtirilgan boshqarish tizimlari
TJ ABT ning maqsad va vazifalari:
Tizim faoliyatining aniq maqsadlarini aniqlash jarayonlarni boshqarishning avtomatlashtirilgan tizimini loyihalashning asosiy vazifasi hisoblanadi. Quyidagi maqsadlarni shakllantirish mumkin:
– yoqilg‘i, xomashyo, materiallarni tejash;
– TBO xavfsizligini ta’minlash;
– ishlab chiqarilgan mahsulot sifatini oshirish;
– ishlab chiqarish mehnati narxini pasaytirish;
– uskunaning optimal yuklanishiga erishish;
– TBO ish rejimlarini optimallashtirish.
TJ ABT funksiyalari ma’lum bir boshqaruv maqsadiga erishishga qaratilgan tizim harakatlarining to‘plamidir. Tizim harakatlari majmui deganda tizim qismlari tomonidan bajariladigan operatsiyalar va harakatlar ketma-ketligi tushuniladi.
TJ ABT funksiyalari quyidagi sinflarga bo‘linadi:
– menejer;
– informatsion;
– yordamchi.
Nazorat funksiyasining natijasi nazorat harakatlarini ishlab chiqish va amalga oshirishdir. Nazorat harakatlarini ishlab chiqish – mavjud ma’lumotlarga asoslanib, ulardan eng oqilonasini tanlashdir.
Amalga oshirish ishlab chiqilgan nazorat harakatlarini amalga oshirish bo‘yicha harakatlardan iborat. TJ ABT dagi «ishlab chiqish» va «amalga oshirish» tushunchalarining farqi ularni amalga oshiradigan sub’ektlarning (elektron kompyuter yoki operator) ajralishi bilan bog‘liq.
TJ ABT boshqaruvining asosiy funksiyalari:
– individual texnologik parametrlarni tartibga solish;
– texnologik operatsiyalar yoki agregatlarni bir davrli mantiqiy nazorat qilish;
– uskunalar guruhini dasturiy mantiqiy nazorat qilish;
– barqaror yoki vaqtinchalik texnologik rejimlarni yoki TJ ning alohida bosqichlarini optimal boshqarish;
– umuman obyektni moslashuvchan boshqarish.
Avtomatlashtirilgan jarayonni boshqarish tizimining axborot funksiyasining mazmuni ABO holati to‘g‘risidagi ma’lumotlarni to‘plash, qayta ishlash va tezkor xodimlarga taqdim etish yoki ushbu ma’lumotlarni keyingi qayta ishlash uchun uzatishdir. Asosiy axborot funksiyalari quyidagilarni o‘z ichiga oladi:
– texnologik parametrlarni markazlashtirilgan nazorat qilish va o‘lchash;
– jarayon parametrlarini (texnik va iqtisodiy ko‘rsatkichlar, ichki o‘zgaruvchilar va boshqalar) bilvosita o‘lchash (hisoblash);
– operativ xodimlarga ma’lumotlarni shakllantirish va berish;
– tegishli boshqaruv tizimlariga axborot tayyorlash va uzatish;
– ABO va uning jihozlari holatining umumlashtirilgan bahosi va prognozi.
Axborot va nazorat funksiyalari asosiy bo‘lib, ular ma’lum bir iste’molchiga (TOU, operatsion xodimlar, tegishli avtomatlashtirilgan boshqaruv tizimlari va boshqalar) qaratilgan.
Avtomatlashtirilgan jarayonlarni boshqarish tizimlarining yordamchi funksiyalari tizim ichidagi vazifalarni hal qilishni ta’minlaydi va tizimdan tashqarida iste’molchiga ega emas. Ular texnologik jarayonlarni boshqarishning avtomatlashtirilgan tizimining texnik vositalari (AVT) majmuasining ishlashini ta’minlaydi.
TJ ABT tasnifi:
– markazlashtirilgan;
– taqsimlangan.
Nazorat savollari
1. Texnologik jarayonlarni avtomatlashtirishdan maqsad nima?
2. TJ ABT funksiyalari qanday sinflarga bo‘linadi?
3. TJ ABT boshqaruvining asosiy funksiyalari nimalardan iborat?
4. TJ ABT axborot funksiyalari nimalarni o‘z ichiga oladi?
2.4. Markazlashtirilgan jarayonlarni boshqarish tizimlari
Markazlashtirilgan texnologik boshqaruv tizimlarida markaziy boshqaruv postining kompyuter xonasida bitta elektron qurilma (kompyuter) o‘rnatilgan.
TJ ABT funksiyalarini amalga oshirish rejimiga ko‘ra, ular quyidagilarga bo‘linadi:
1. TJ ABT boshqaruv funksiyalarini avtomatlashtirilgan tarzda bajaruvchi
Bunday avtomatlashtirilgan jarayonlarni boshqarish tizimlarida operator-texnolog qaror ishlab chiqadi (yoki qabul qiladi) va (yoki) nazoratni amalga oshiradi. Quyidagi tiplar mavjud:
1.1. Kompyuter tizimi (KT) axborotchi funksiyasini o‘taydi, bajarish qo‘lda boshqariladigan TJ ABT. Inson nazorat harakatlarini tanlaydi va amalga oshiradi.
1.2. «Maslahatchi» rejimida KT bilan TJ ABT. Bu erda KT kiritilgan ma’lumotlarni tahlil qiladi, optimal yechimni qidiradi, vizual displey qurilmalarini (VDQ) boshqarish bo‘yicha tavsiyalar (maslahat) beradi. Operator-texnolog maslahati va o‘ziga ko‘ra nazoratni tanlaydi va amalga oshiradi.
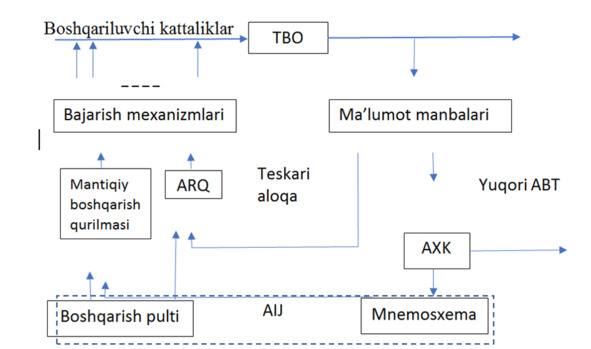
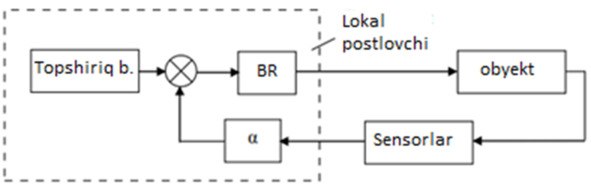
2.8 – rasm. TJ ABT strukturasi. TBO- texnologik boshqarish obyekti, ARQ- avtomatik rostlash qurilmasi, AXK- axborot hisoblash kompleksi, AIJ- avtomatlashgan ish joyi.
Bunday avtomatlashtirilgan jarayonni boshqarish tizimining blok sxemasi 2.5-rasmda ko‘rsatilgan., bunda quyidagi belgilar kiritiladi: – operator-texnologning avtomatlashtirilgan ish joyi; ART – avtomatik rostlash tizimlari. Boshqaruv panelidan operator-texnolog ART sozlamalarini o‘rnatadi. Teskari ARTga informatsiyalar bevosita manbalaridan olinadi.
Nazorat savollari
1. TJ ABT qanday turlarga bo‘linadi?
2. Rostlash qurilmasi nima?
3. Mnemosxema nima?
4. Yuqori ABT nima?
III BOB. ABTOMATLASHTIRISHNING ASOSIY TEXNIK VOSITALAR TARKIBI
Texnik vositalarning asosiy tiplari sifatida quyidagilarni sanab o‘tish mumkin:
1- sath qurilmalar:
– sensorlar (datchiklar);
– boshqaruv modullari;
– topshiriq berish bloklari;
– mantiqiy-buyruqli boshqaruv modullari;
– galvanik izolatsiya modullari;
– signalni normallashtirish va filtrlash modullari;
– ma’lumotlarni taqdim etish modullari;
– boshqaruv harakatlari modullari;
– bufer xotirasi;
– dasturlashtiriladigan taymerlar;
– funksional konvertorlar.
II sath – apparat va dasturiy ta’minot (holat uchun yechim to‘plangan
intellektual vazifalar, moslashuvchan algoritmik tuzilma):
– dasturiy mantiqiy boshqaruv bloki;
– ko‘p kanalli ma’lumotlarni yig‘ish va qayta ishlash bloki;
– PLC dasturlashtiriladigan mantiqiy kontrollerlar (PLC).
III sath – umum tizim vositalari:
– aloqa adapterlari;
– umumiy xotira bloklari;
– avariya qurilmalar (avariya holatlarida tizim holatlarini qayd etish);
– operator konsoli (umum tizimni nazorat qiladi);
– signalizatsiya va boshqaruv sxemalari.
Texnik vositalar axborot tamoyiliga ko‘ra bo‘linish quyidagicha ifodalash mumkin:
– obyekt yoki jarayonning holati to‘g‘risida ma’lumot olish uchun qurilmalar (datchiklar, qurilmalar);
– asosiy ma’lumotlarni o‘zgartirish uchun qurilmalar (normallashtirish
qurilmalar, elektr izolatsiyasi va kodlash) axborotni uzatish uchun aloqa kanallari orqali;
– axborotni konvertatsiya qilish, qayta ishlash, saqlash va buyruqlar va boshqaruv harakatlarini yaratish qurilmalari (kompyuter texnologiyalari, algoritmlar);
– axborotni konvertatsiya qilish va boshqaruv buyruqlarini uzatish qurilmalari (harakatlantiruvchi qurilmaga uzatish uchun);
– buyruq ma’lumotlarini (drayvlarni) bajarish, kuchaytirish uchun qurilmalar;
– ijro etuvchi qurilmalar va tartibga soluvchi organlar (to‘sqichlar, tiristorlar, konvertorlar).
Uskunalarni birgalikda faoliyat yuritish muammosi TJ ABTni birlashtirishni joriy qilishni talab qiladi – ulanish uchun ma’lum parametrlar bo‘yicha qurilmalarni standartlashtirish, ularni bir-biriga qo‘shimcha qurilmalarsiz ulash imkoniyati bo‘lmasligi mumkin. Xususan, zarur qurilmalar o‘rtasida almashinadigan signallar parametrlarini birlashtirish uchun keltirilgan signallarga o‘tish lozim (3.1-jadvaldagi misol).
Masalan «4 – 20 mA» diapazonidagi joriy standart quyidagi afzalliklarga ega:
– tizimdagi sim uzilishini sezish oson;
– 4 mA qo‘shimcha tok yordamida masofaviy datchiklar yoki qurilmalarni quvvatlantirish mumkin;
– signal bir juft sim orqali uzatiladi yoki qabul qilinadi.

Nazorat savollari
1. ABT da sensorlar (datchiklar) qanday vazifani bajaradi?
2. Boshqaruv modullari qanday qurilmalardan tashkil etiladi?
3. Galvanik izolatsiya modullari nima uchun kerak?
4. Ma’lumotlarni taqdim etish modullariga qanday qurilmalar kiradi?
5. Keltirilgan signal nima?
IV BOB. OBYEKT HAQIDA MA’LUMOTLARNI QABUL QILISH QURILMALARI. SENSORLAR
Birlamchi axborot qurilmalari – sensorlar – ma’lumotni mazmunini o‘zgartirmasdan yig‘ish va o‘zgartirish uchun mo‘ljallangan. Sensor ikki qismdan iborat (4.1-rasm):
Sensor elementi – chiqishida tabiiy (standartlashtirilmagan) parametrni ma’lum signalga o‘zgartiruvchi sezgir element;
– sezgir elementning chiqish qiymatini standart shaklga keltiradigan o‘lchov qurilmasi (4.2-rasm). Ko‘pincha, bu qismlar tizimli ravishda bitta korpusda amalga oshiriladi, buning natijasida birlashtirilgan chiqishga ega signal «sensor» dan olinadi.
Ammo ular alohida ishlab chiqarilgan mustaqil qurilmalar bo‘lishi ham mumkin.
Sensor – bu boshqariladigan qiymatni o‘lchash, saqlash, qayta ishlash va uzatish uchun qulay bo‘lgan signalga aylantiruvchi o‘lchash, signalizatsiya, tartibga solish yoki boshqarish moslamasining elementi.
Boshqacha qilib aytganda, sensor bu har qanday fizik kattalikning boshqarish tizimiga kirishiga, keyingi foydalanish uchun qulay bo‘lgan signalga aylantiradigan qurilma.

4.1 – rasm. O‘lchash o‘zgartirgich (sensor) strukturasi: X- fizik kattalik (texnologik parametr), SE- sezgir element, O» O» – o‘lchov o‘zgartirgich, N-K/Q- normalashtiruvchi-kuchaytirgich o‘zgartirgich.
Sensorlar tomonidan o‘zgartirilgan kirishda o‘lchanadigan va boshqariladigan qiymatlar TJ ning fizik parametrlariga mos keladi. Masalan, quyidagi texnologik parametrlar keng tarqalgan:
– energetik parametrlar: harorat, bosim, bosimning pasayishi, sath, sarf;
– elektr parametrlar: o‘zgaruvchan va o‘zgarmas tok, o‘zgarmas va o‘zgaruvchan kuchlanish, aktiv/reaktiv quvvat, to‘la quvvat, quvvat koeffitsienti, chastota, induksiya;
– mexanik kattaliklar: chiziqli, burchakli (burchak) tezligi, deformatsiya, kuch, moment, qattiqlik, tebranish, massa, shovqin;
– kimyoviy: konsentratsiyasi, kimyoviy tarkibi, kimyoviy xossalari;
– fizik: namlik, zichlik, yopishqoqlik, loyqalik, elektr o‘tkazuvchanlik, magnit kirituvchanlik.
Sensordan chiqish kattaliklari odatda modulatsiya qilinadi:
– amplituda bo‘yicha;
– vaqt atributi (chastota, faza va boshqalar);
– kodi bo‘yicha;
– fazaviy xususiyat (aloqa kanallarida signallarning almashinishi).
O«lchov o‘zgartichlarining (sensorlarning) asosiy parametrlari:
1. Kirish qiymatini o‘zgartirish diapazoni (kirish diapazoni, qiymat turi).
2. Chiqish signalining qiymatini o‘zgartirish diapazoni.
3. Statik xarakteristikalari (aniqlik darajasi). Dinamik xatolarni hisobga olmagan holda kirish va chiqish qiymati o‘rtasidagi munosabatni ko‘rsatadi (4.2-rasmga qarang). Umuman olganda, bu xususiyat chiziqli emas. Odatda ishchi nuqtasida chiziqli bo‘ladi (4.2-rasmdagi to‘g‘ri chiziqlar).

4.2- rasm. Harorat sensorining statik Xarakteristikasi.
Dinamik xarakteristikalar (maksimal chastota, chiqish signalini vaqt bo‘yicha qiymatlari) o‘tish rejimda chiqish qiymatining kirish qiymatiga bog‘liqligini ko‘rsatadi (4.3-rasm).

4.3 – rasm. Sensorlarning dinamik xususiyatlari.
Agar sensor kirishiga turli chastotali o‘zgaruvchan signal qo‘llanilsa, sensorning chastotali xarakteristikasi o‘rganiladi, u quyidagi rasmda ifodalangan.
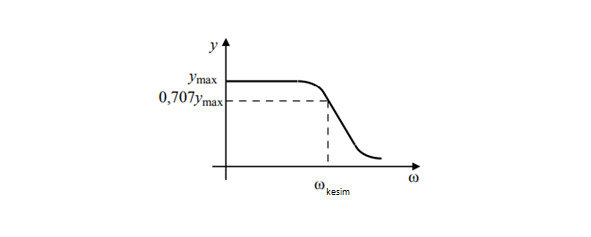
4.4 – rasm. Sensor chastota Xarakteristikasi
Bu yerda ωkesm – bu kesim chastotasi, uzatish koeffitsienti 3 dB ga o‘zgarganda chastota boshlang‘ich qiymatdan 0,707 ga teng bo‘lgan kesish chastotasi. Kesish chastotasi tiklanish vaqti t = 1/ ωkesm ga to‘g‘ri keladi.
Sezuvchanlik chegarasi (sezmas zona) – shovqin va tashqi ta’sirni kamaytirish uchun kiritiladi. U sezmas zona bir tomonlama yoki ikki tomonlama bo‘lishi mumkin (4.5-rasm).

4.5 – rasm. Sezuvchanlik/sezuvchanlik chegarasi
Nazorat savollari
1. Sensorlarni vazifasi nima?
2. Sensorlar qanday qisimlardan iborat?
3. Sensordan chiqish kattaliklari qanday modulyatsiya qilinadi?
4. O‘lchov o‘zgartichlarining (sensorlarning) asosiy parametrlari qaysilar?
5. Sensorlarning dinamik va statik xususiyatlarini farqini tushuntiring.
V BOB. Xatoliklar
O«lchash va boshqarish tizimlarida ma’lum xatoliklar kuzatiladi. Ularni shartli quyidagilarga bo‘lish mumkin:
– asosiy Sasos;
– qo‘shimcha Sqo‘sh (qo‘shimcha omillar tufayli yuzaga keladi namlik, harorat va boshqalar).
Biz qo‘shimcha omillarni hisobga olgan holda umumiy xatoni hisobga olamiz:
Qo‘shimcha xato texnologik parametrlarining funksiyasi sifatida aniqlanadi:

Loyihalash jarayonida tanlangan sensorlarga qo‘yiladigan asosiy talablar:
– chiqish qiymatining kirishga aniq bog‘liqligi;
– vaqt bo‘yicha xususiyatlarning barqarorligi;
– yuqori sezuvchanlik;
– obyektga nisbatan kichik o‘lcham va vazn;
– nazorat qilinadigan jarayon bo‘yicha va boshqariladigan parametr bo‘yicha hech qanday aks ta’sir yo‘q;
– har xil ish sharoitlarida ishlash;
– chiqish signallarini boshqa tizim vositalari bilan birlashtirish;
– turli markalilarini o‘rnatish imkoniyatlari.
Nazorat savollari
1. Asosiy xatoliklarga qaysilar kiradi?
2. Qo‘shimcha xatoliklar manbalarini tushuntiring?
3. Sensorlarga qanday talablar qo‘yiladi?
4. Xatoliklar qanday kamaytiriladi?
VI BOB. SENSORLARNING TASNIFI
Avtomatlashtirish tizimlarida qo‘llaniladigan sensorlar juda xilma-xil bo‘lib, ularni turli mezonlarga ko‘ra tasniflash mumkin.
6.1. Kirish kattaliklari bo‘yicha tasniflash
I. Mexanik datchiklar:
– elastik (membranalar);