
Глубина
Таблица 2. ГОА с рабочей глубиной 6000 метров и более

Технические характеристики шеститысячников – малогабаритных, легких и маневренных – даны в таблице 3.
Таблица 3. Технические данные современных ГОА с рабочей глубиной 6000 метров, построенных в 1980-е годы
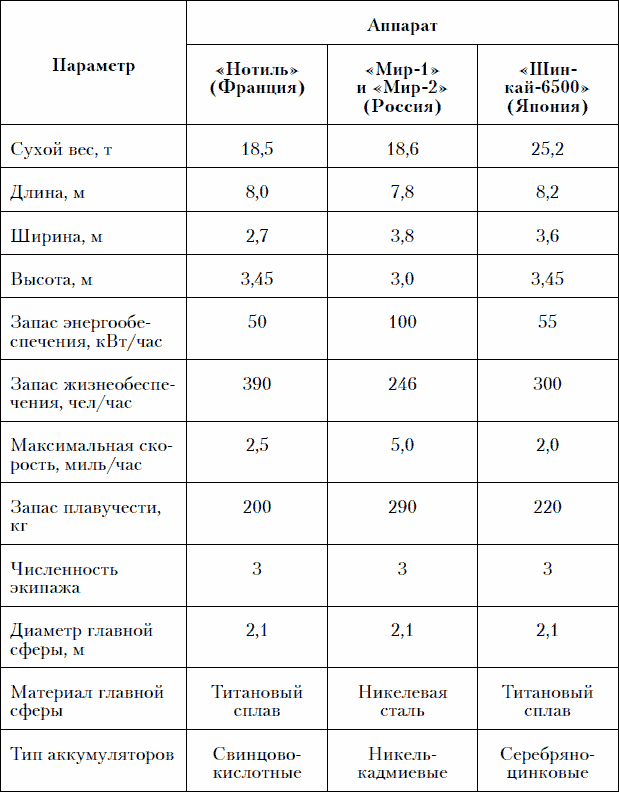
В настоящее время эксплуатируются лишь пять таких аппаратов: французский «Нотиль», японский «Шинкай-6500» китайский «Яолонг» и наши отечественные «Миры». Сравнение их технических данных показывает несомненное преимущество ГОА «Мир», обладающих наибольшей энергоемкостью и высокой скоростью передвижения под водой, что очень важно с точки зрения эффективности использования глубоководных обитаемых аппаратов.
В США после выведения из эксплуатации в 1998 году «Си Клиффа» используется лишь заслуженный «Алвин», который был переоборудован на рабочую глубину 4500 метров в 1972 году из аппарата с рабочей глубиной 2000 метров, построенного в середине 60-х годов. В 2015 году «Алвин» переоборудовали на рабочую глубину 6500 метров. На сегодняшний день есть и более глубоководные аппараты – китайский «Jialong» рассчитан на 7000 м, одноместный «Deepsea Challenger» – на 11 000 м. На последнем совершил погружение в Марианскую впадину Джеймс Кэмерон. Однако по меркам 80-х годов XX века глубина в 6 000 метров была максимальной, и она достаточна для подводных исследований 98 % площади дна Мирового океана.
Таким образом, сегодня в мире имеются только восемь шеститысячников. Два из них – «Мир-1» и «Мир-2» – базируются на борту научно-исследовательского судна (НИС) «Академик Мстислав Келдыш». Эти аппараты прошли большой и интересный путь эксплуатации: от научных исследований в различных районах Мирового океана, поисков и обследований лежащих на дне объектов – до погружений с туристами и участия в съемках профессиональных видео- и кинофильмов. По признанию ученых и инженеров, «Миры» являются наиболее совершенными из всех на имеющихся сегодня ГОА. Ведущие зарубежные специалисты-подводники называют их аппаратами XXI века.
В этой связи вспоминаются некоторые встречи и первые погружения с зарубежными коллегами. В 1988 году научно-исследовательское судно «Академик Мстислав Келдыш» возвращалось из своего первого рейса в Атлантический океан. На обратном пути мы должны были зайти в Амстердам. Я направил приглашения посмотреть новые аппараты Жаку Пикару, Дону Уолшу, а также и Фрэнку Басби – крупнейшему американскому специалисту в области создания и эксплуатации обитаемых аппаратов. В Амстердам прилетели Пикар и Басби. Как уже упоминалось, Жак Пикар, помимо того что погружался в Марианскую впадину, был создателем нескольких обитаемых аппаратов: батискафа «Триест», туристического аппарата «Огюст Пикар», аппарата «Бен Франклин», использовавшегося в течение месячного дрейфа в толще воды для изучения Гольфстрима, и «Форель», на котором проводились исследования на Женевском озере и в Средиземном море. Осмотрев «Мир-1» и «Мир-2» снаружи, мы все залезли внутрь обитаемой сферы и провели там – молча – два часа. Мнение обоих специалистов было единодушным: ничего подобного в мире сейчас нет. Обоим понравились и внешние обводы аппаратов, и рациональные технические решения, внутреннее их устройство – современное и просторное. Басби по возвращении в США рассказал подводникам и ученым о новых аппаратах. Поступили запросы на статью из журнала Sea Technology, приглашения на конференцию Морского технологического общества США в Балтиморе и конференцию по подводным аппаратам в Новом Орлеане.
Все это способствовало популяризации аппаратов «Мир» среди ученых и профессионалов-подводников, а в наступавших непростых экономических условиях в какой-то степени прокладывало дорогу к их участию в международных проектах.
В 1989 году проходил Международный геологический конгресс в Вашингтоне. Наше судно «Академик Мстислав Келдыш» с «Мирами» на борту приняло участие в работе конгресса. На борту была размещена выставка достижений российской науки в области морской геологии. На судне прибыла в Вашингтон группа наших ведущих геологов. При пересечении Атлантического океана мы сделали одну остановку, для того чтобы провести научные исследования на интересной геологической структуре Кингс Троф. В этом районе было сделано несколько погружений «Миров». В погружениях приняли участие специалисты-глубоководники Эмори Кристоф и Ролф Вайт из Национального географического общества США и подводник из Канады Джозеф Макиннис. Это были первые погружения российских аппаратов с известными американскими и канадскими подводниками. Двойное погружение аппаратов на глубину 5100 метров превзошло все ожидания наших зарубежных коллег. Отзывы о технических возможностях «Миров» были самыми высокими. Недаром и Кристоф, и Вайт до настоящего времени не упускают ни одной возможности погрузиться на наших аппаратах. «Келдыш» простоял в Вашингтоне две недели. За это время многие ученые и специалисты-подводники побывали на судне с единственной целью – посмотреть наши аппараты. Как-то из Вудсхолского океанографического института приехали Аллин Вайн – создатель аппарата «Алвин», Барри Уолден – руководитель подводных операций на «Алвине» и главный пилот Дадли Фостер. Ситуация оказалась вполне аналогичной тому, что было в Амстердаме: профессионалы-подводники сидели молча внутри обитаемой сферы, не задавали вопросов и читали подписи на английском языке под тумблерами и индикаторами… Потом мы, расположившись у меня в каюте на судне, говорили о разном. И лишь покидая каюту, Аллин Вайн сказал мне: «The best». Более высокой оценки нашего труда и ожидать невозможно – ведь она была дана одним из выдающихся специалистов в области создания глубоководной техники.
Мне представляется необходимым вкратце ознакомить читателя с техническим устройством аппарата «Мир».
«Мир-1» и «Мир-2»
Глубоководные обитаемые аппараты многие зарубежные специалисты называют мини-субмаринами. Очевидно, это обусловлено некоторым их сходством с большими подводными лодками как по устройству, так и по методу эксплуатации – в режиме свободного плавания под водой, без жестких или гибких связей (типа кабелей или тросов) с поверхностью или с судном обеспечения. Безопасность пребывания человека на большой глубине обеспечивает прежде всего прочный корпус; остальные элементы и системы аппарата предназначены для доставки прочного корпуса на заданную глубину, передвижения под водой и возвращения обратно на поверхность. В качестве источника энергии на большинстве современных ГОА используются аккумуляторные батареи. Прочный корпус, отдельные конструктивные элементы и базовые узлы систем объединяются связующей рамой в единую конструкцию, которая закрывается сверху легким корпусом, который обычно изготавливается из стеклопластика и придает аппарату обтекаемую форму. Такова общая конструктивная схема устройства обитаемого аппарата.
Прочный корпус сделан из стали с высоким содержанием никеля. Две полусферы, изготовленные способом литья и прошедшие термическую и механическую обработку, соединены с помощью болтов. Сфера имеет три иллюминатора: центральный – внутренним диаметром 200 миллиметров и два боковых – диаметром 120 миллиметров. Иллюминаторы обеспечивают хороший обзор при работе под водой. В качестве источника энергии используются никель-кадмиевые аккумуляторы, которые заменили применявшиеся первоначально железо-никелевые. Общий энергетический запас аппарата «Мир» составляет 100 киловатт в час.
Аппарат имеет три балластные системы. Система главного балласта состоит из двух емкостей, изготовленных из стеклопластика. Общая их емкость – 1500 литров. При погружении аппарата емкости заполняются водой, благодаря чему его плавучесть становится близкой к нейтральной. Дальнейшая балластировка производится с помощью системы тонкого балласта, которая позволяет регулировать плавучесть в широких пределах, давая возможность погружаться и всплывать со скоростью до 35–40 метров в минуту и зависать на любом горизонте в толще воды.
При всплытии на поверхность емкости системы главного балласта продуваются воздухом, придавая аппарату плавучесть +1500 килограммов и обеспечивая нормальную ватерлинию на волне.
Система тонкой балластировки состоит из трех прочных сфер – двух носовых и одной кормовой – общей емкостью 999 литров. В ходе погружения аппарата в эти сферы принимается вода, которая позволяет регулировать его плавучесть. Для придания аппарату положительной плавучести вода из прочных сфер откачивается с помощью специальных насосов высокого давления. Таким образом, аппараты «Мир» работают полностью на водяном балласте, в отличие от зарубежных глубоководных аппаратов, которые продолжают частично использовать принципы батискафов, т. е. сброс твердого балласта в виде чугунных чушек или мешков с песком.
Насосы высокого давления снабжены гидравлическими приводами. Аппараты имеют три системы гидравлики. Первая, мощностью 15 киловатт, управляет основным насосом высокого давления и движительным комплексом аппарата. Энергия аккумуляторных батарей преобразуется с помощью специального инвертора в энергию переменного тока, которым питается электродвигатель – привод гидравлической помпы. Управление насосом высокого давления и движительным комплексом осуществляется через систему клапанов, расположенных снаружи в масляной коробке и управляемых пилотом изнутри обитаемой сферы.
Вторая система гидравлики устроена по аналогичной схеме, но имеет меньшую мощность – 5 киловатт. Она управляет всеми внешними выдвижными устройствами: манипуляторами, штангами, бункерами и т. д., дифферентным насосом, перекачивающим водяной балласт из носовых сфер в кормовую и обратно, обеспечивая тем самым нужный угол дифферента аппарата. Кроме того, вторая гидравлическая система управляет вторым насосом высокого давления, который используется как аварийный: в случае отказа основного насоса или первой системы гидравлики второй насос позволяет откачать водяной балласт и обеспечить всплытие аппарата на поверхность.
Третья система гидравлики аварийная, она дает возможность осуществить сброс некоторых частей аппарата в случае возникновения аварийной ситуации. Приводом гидравлической помпы в этой системе служит электродвигатель постоянного тока, который питается напрямую от основных аккумуляторов аппарата или от аварийной батареи. Необходимо отметить, что сброс отдельных элементов аппарата в случае аварийной ситуации может производиться и от второй системы гидравлики. На приведенной схеме ГОА «Мир» выделены те части аппарата, которые могут быть сброшены. Прежде всего, это выступающие части конструкции (которыми аппарат может зацепиться на дне за тросы, кабели и т. д.): главный и боковые двигатели; крыло; кисти манипуляторов (в случае, если что-то взято в кисть, а механизм ее разжимания не работает); аварийный буй, выходящий после отдачи от аппарата на поверхность на тонком нейлоновом тросике длиной 8000 метров; кроме того, может быть сброшен нижний аккумуляторный бокс основной батареи весом около 1000 килограммов.
На аппаратах «Мир» имеется также система аварийного балласта (выше упомянута как третья балластная). В двух жестких стеклопластиковых контейнерах находится 300 килограммов никелевой дроби, удерживаемой электромагнитами, снятие напряжения с которых позволяет частично или полностью сбросить дробь и придать аппарату положительную плавучесть.
Важной частью аппаратов является движительный комплекс. Главный кормовой движитель мощностью 12 киловатт управляет движением в горизонтальной плоскости, обеспечивая повороты аппарата в пределах ±60°. Два боковых движителя мощностью 3,5 киловатта каждый имеют поворотное устройство, которое позволяет поворачивать их в вертикальной плоскости в пределах 180°; благодаря этому возможно осуществлять вертикальное перемещение аппарата во время его движения вперед на главном движителе, а также – в горизонтальной плоскости в случае отказа главного движителя. Такое устройство комплекса обеспечивает гибкое управление аппаратом, придавая ему хорошую маневренность, что очень важно при работе у дна в условиях сложного рельефа или на донных объектах сложной конфигурации.
Внутри обитаемой сферы во время погружения поддерживаются нормальное атмосферное давление и газовый состав воздуха. Система жизнеобеспечения включает кислородные баллоны с дозаторами, через которые атмосфера внутри сферы пополняется кислородом, и сборник углекислого газа со сменными кассетами, заполненными поглотителем СО2 (обычно гидрат окиси лития или калия). Вентиляторы постоянно прогоняют воздух через поглотитель углекислого газа, а также через специальный фильтр вредных примесей, заполненный активированным углем и палладием. Таким образом осуществляется очистка атмосферы в кабине. Контроль за содержанием в ней различных компонентов производится с помощью специальных индикаторов, показывающих процентное содержание в атмосфере кислорода, двуокиси и окиси углерода. Имеются также мониторы давления, температуры и влажности внутри кабины.
ГОА «Мир» оснащены современными средствами подводной навигации. Она позволяет определять точное положение аппарата под водой относительно донных гидроакустических маяков, постановка и калибровка которых осуществляется с борта судна по данным системы спутниковой навигации. Пилот может наблюдать траекторию движения аппарата под водой на дисплее, что создает несомненные удобства управления им при поисковых операциях, выходе на донные объекты и т. д. Система подводной гидроакустической связи обеспечивает беспроводную голосовую связь с судном на расстоянии до 10 миль. Гидролокационные средства позволяют вести поиск на дне мелких предметов размером до первых десятков сантиметров.
Аппараты оборудованы гидрофизическими и гидрохимическими датчиками, специальными устройствами для отбора образцов и другой научной аппаратурой. Два идентичных манипулятора (правый и левый) с семью степенями свободы дают возможность отбирать различные образцы – от весьма хрупких до больших и тяжелых, весом около 80 килограмм.
ГОА «Мир» снабжены современной видеоаппаратурой для подводных видеосъемок, а также подводными фотосистемами. Аппараты оборудованы наружным световым и радиомаяками, которые позволяют обнаруживать их на поверхности после всплытия: система радиопоиска на судне обеспечения принимает сигналы от радиомаяка и указывает направление на точку всплытия аппарата.
Необходимо отметить, что в процессе эксплуатации аппаратов постоянно поддерживается их современный технический уровень. Это возможно только за счет совершенствования или замены навигационной и научной аппаратуры, видео- и фотосистем, компьютеризации управления. С момента ввода аппаратов в эксплуатацию их аппаратурное оснащение претерпело существенные изменения: полностью изменены программное обеспечение и отображение информации в системе навигации и сбора научных данных, заменены видео- и фотооборудование, внешнее освещение. Аппараты оборудованы новыми гидролокационными средствами, введены другие новшества. В Лаборатории научной эксплуатации глубоководных обитаемых аппаратов Института океанологии разработаны малогабаритные телеуправляемые модули, оборудованные телевизионными камерами и подводным освещением. Такие модули предназначены для обследования с ГОА «Мир» внутренних помещений затонувших объектов; они управляются по кабелю из обитаемой сферы аппаратов и могут уходить от них на расстояние до 60 метров.
Совершенствование аппаратов «Мир» и установка нового, сделанного по последнему слову техники оборудования значительно расширяет их возможности, что повышает спрос на них со стороны организаций, заинтересованных в проведении глубоководных операций. Однако базовая структура, конструктивные элементы систем, принципы их построения остаются такими же, какими они были первоначально разработаны в 1985–1987 годах, в период создания этих уникальных аппаратов.
Глава вторая
Тернистые пути созидания
Поиск партнера
Появлению аппаратов «Мир», которым в основном и посвящена эта книга, предшествовала довольно длинная история создания и эксплуатации в Институте океанологии им. П. П. Ширшова АН СССР других подводных обитаемых аппаратов, в том числе очень хороших для своего времени аппаратов «Пайсис».
Серию этих аппаратов разрабатывала и строила в Ванкувере фирма International Hydrodynamics Ltd. (сокращенно именуемая «Хайко»). Организованная в 1964 и закончившая свое существование в 1979 году, эта фирма успела создать 11 «Пайсисов» с рабочими глубинами от 600 до 2000 метров, два небольших аппарата «Аквариус», рассчитанных на глубину 300 метров и снабженных крупными иллюминаторами, аппарат «Таурус» с водолазным отсеком, позволяющим выходить в открытый «гидрокосмос», и аппарат SDL – типа «Пайсиса», но с водолазным отсеком. Конструктором «Пайсисов» был главный инженер фирмы Мак Томсон. Автор этих строк проработал на фирме «Хайко» в общей сложности в течение двух с половиной лет: сначала в 1971 году, когда там создавался «Пайсис-IV» и мы делали первую нашу попытку приобрести аппарат этой серии, а затем в 1974–1976 годах, когда строились «Пайсис-VII» и «Пайсис-XI».
Тогда, в 1971 году, наши усилия закончились неудачей: канадское правительство под давлением ВМФ США аннулировало экспортную лицензию на уже практически готовый «Пайсис-IV». Я знал детали этих событий, но более подробно эту историю поведал мне бывший премьер-министр Канады Пьер Трюдо, с которым я совершал погружение в заливе Монтерей в 1990 году в аппарате «Мир-1». Оказывается, командующий ВМФ США адмирал Рековер лично прилетал в Оттаву в ноябре 1971 года и встречался с Пьером Трюдо. В то время все оборудование, предназначенное для проведения работ в океане на глубинах более 1000 метров, не подлежало экспорту в социалистические страны. Вот почему первоначально одобренная канадским правительством экспортная лицензия была ликвидирована, а аппарат «Пайсис-IV» был куплен у фирмы «Хайко» канадским правительством и передан в Океанографический институт в г. Виктория для проведения научных исследований.
В истории создания аппаратов «Пайсис-VII» и «Пайсис-XI», а в дальнейшем и ГОА «Мир» важная роль принадлежит профессору Игорю Евгеньевичу Михальцеву. В середине 60-х он пришел в Институт океанологии имени П. П. Ширшова АН СССР и стал работать сначала в качестве директора Тихоокеанского отделения во Владивостоке, а затем – заместителя директора по океанологической технике в нашем головном институте в Москве. С приходом Михальцева коренным образом изменилось техническое направление работ Института. Началась разработка гидроакустических методов исследований океана. Было создано опытно-конструкторское бюро океанологической техники (ОКБ ОТ), группой инженеров которого в 1977 году был введен в эксплуатацию обитаемый аппарат «Аргус» с рабочей глубиной 600 метров, а в 1982 году сконструирован обитаемый аппарат «Осмотр» с водолазным отсеком и рабочей глубиной 300 метров. Названные аппараты и их последующая эксплуатация стали важными этапами в освоении глубин океана подводниками и учеными Института океанологии. В дальнейшем появление в Институте вычислительного центра, вооруженного современным компьютером, позволило аккумулировать огромный объем научных данных. Иными словами, в течение нескольких лет в отечественной океанологии было создано инженерно-техническое направление современного типа.
Конечно, И. Е. Михальцев отлично понимал, что дальнейшее развитие океанологической науки немыслимо без глубоководных обитаемых аппаратов, которые максимально приблизили бы ученых к объекту исследований.
Бесспорными лидерами в создании обитаемых аппаратов были в то время американские ученые и инженеры. Приближались к ним по уровню французы. Однако в США разработка новых аппаратов приняла тогда широкомасштабный характер. Несомненно, это было обусловлено гибелью в 60-е годы подводных лодок, которые не имели спасательных средств в случае бедствия. Громоздкие батискафы уже не отвечали тем необходимым техническим требованиям, которые предъявлялись к подводным аппаратам. И вот американцы в течение двух-трех лет организовали несколько небольших фирм, которые стали конструировать обитаемые аппараты современного уровня – малогабаритные и легкие.
В СССР подводные аппараты создавались главным образом в Минсудпроме, но, в отличие от зарубежных аналогов, они имели большие габариты и вес, требуя к тому же для своей эксплуатации специальных судов-носителей. Кроме того, в нашей стране тогда не существовало навигационного, научного, телевизионного и специального навесного оборудования, которое необходимо для оснащения подводного аппарата. Приобрести для Института океанологии современный глубоководный обитаемый аппарат, представляющий собой автономно управляемый комплекс, оборудованный современной научной и навигационной аппаратурой, – именно такая идея лежала в основе выдвинутого проекта. Наиболее рациональным путем его реализации представлялось приобретение аппарата за границей. Эта идея была воплощена в жизнь благодаря энергии и большим усилиям И. Е. Михальцева. Прежде всего, нужно было убедить руководство нашего государства в необходимости такого приобретения за рубежом и выделения финансовых средств из госбюджета. На следующем этапе требовалось преодолеть сложности, связанные с экспортом глубоководной техники из капиталистической страны. Все эти проблемы удалось решить, но не сразу.
Поиск фирмы, которая могла бы поставить в СССР глубоководный аппарат, изготовленный и скомплектованный по нашему проекту, разработанному под руководством И. Е. Михальцева, были начаты в 1970 году. И лишь в 75-м и 76-м мы получили «Пайсис-VII» и «Пайсис-XI». Первый аппарат строился в Швейцарии из узлов и материалов, вывезенных фирмой «Хайко» из Канады. Его приемочные испытания проводились в Италии, а затем он был доставлен в Новороссийск на советском грузовом судне. «Пайсис-XI» строился в Ванкувере и в мае 1976 года был переправлен во Владивосток также на грузовом судне.
После приобретения этих глубоководных обитаемых аппаратов началась их эксплуатация. Сначала они работали на Черном море, где на них установили навигационное и научное оборудование, приобретенное отдельно (тоже по причинам эмбарго). В Геленджике, на базе Института океанологии, был оборудован береговой комплекс для спуска аппаратов в воду и подъема обратно с помощью мощных лебедок – без использования судна-носителя. В этот же период шло обучение группы пилотов. Летом 1977 года во время экспедиции на озеро Байкал «Пайсисы» сделали 42 погружения, принесших интереснейшей научный материал. Затем были организованы работы в Тихом океане, в Красном море, исследовались рифтовые зоны в Атлантическом и Индийском океанах и т. д. В период эксплуатации «Пайсисов» был накоплен неоценимый опыт проведения глубоководных работ, который пригодился в дальнейшем при создании аппаратов «Мир».
Поиск путей размещения заказа на строительство обитаемого аппарата с рабочей глубиной 6000 метров был начат сразу по завершении строительства аппарата «Пайсис XI». В 1976 году поступило предложение на создание шеститысячника от дизайнера «Пайсисов» Томсона, а несколько позже появилась фирма Canadian Underwater Vehicles («Канадские подводные аппараты»). Новый проект был необычным. Если большинство обитаемых аппаратов того времени в качестве источника энергии применяли аккумуляторы, то в предлагаемом варианте ГОА должен был использоваться двигатель, работающий на гидразине – своего рода газовая турбина. Такое техническое решение расширяло возможности аппарата, увеличивало его энергетический запас и длительность погружений. Прототип гидразинового двигателя разработала одна из небольших канадских фирм, а затем испытала его в лабораторных условиях. Контракт на поставку шеститысячника, получившего название «Академик», был подписан с фирмой «Канадские подводные аппараты» в 1979 году. В качестве материала для обитаемой сферы выбрали титановый сплав. Аппарат должен был весить не более 10 тонн. К сожалению, этому контракту не суждено было осуществиться. Но дело не остановилось. Поиск нового зарубежного партнера по-прежнему возглавлял И. Е. Михальцев.
Почему мы для приобретения ГОА «Пайсис» и создания шеститысячника вынуждены были обращаться к зарубежным фирмам? Могла ли наша промышленность, в те годы сооружавшая уникальные космические корабли и современные подводные лодки, построить глубоководный аппарат с аналогичными характеристиками? Безусловно, аппараты типа «Пайсис» и «Академик» могли быть сделаны в нашей стране. Однако здесь вставал вопрос о целесообразности, финансовом и временном факторах. Создание аппарата потребовало бы определенной перестройки промышленного предприятия, что при изготовлении единичных дорогостоящих образцов нерентабельно. Для освоения и внедрения новых технологий нужны были время и большие финансовые вложения. Существенным оказалось и то обстоятельство, что в связи с оснащением ГОА современной аппаратурой возникала необходимость привлечь к созданию аппарата целый комплекс организаций. Совокупность всех этих факторов склонила чашу весов к идее размещения заказов за рубежом.