Эксплуатация современных судовых дизельных установок
Поршень 28 гидравлического цилиндра имеет металлическое уплотнительное кольцо, расположенное в канавке поршня. В кормовой части цилиндра на стакане 32 расположены две мощные пружины 33, которые устанавливают лопасти в положение полного переднего хода в случае падения давления масла в гидросистеме и удерживают поршень в этом положении. Это позволяет судну сохранить передний ход в случае выхода из строя гидропривода. При сборке винта пружины предварительно зажимают между поршнем и стаканом.
Поршень соединен с ползуном, имеющим трехгранную форму и служащим для преобразования возвратно-поступательного движения поршня в поворотное движение лопастей. Внутренняя полость ступицы полностью заполнена маслом. Т
Внутри штока поршня расположен маслораспределительный золотник 34, при перемещении которого масло перепускается в одну или другую полость гидравлического цилиндра по соответствующим каналам. Золотник 34 при помощи шарнирного соединения соединен с управляющей штангой 35, проходящей внутри полого гребного вала 2. Шарнирное соединение служит для предотвращения заклинивания золотника в гильзе, к которой он притерт, в случае появления перекосов из-за деформации гребного вала.
По управляющей штанге масло под давлением подводится к маслораспределительному золотнику. Если передвинуть маслораспределительный золотник (при помощи управляющей штанги 35), то откроется подача масла в гидроцилиндр и вместе с золотником начнёт перемещаться поршень. После того, как золотник остановится в заданном положении, поршень, продолжая движение под давлением масла, поступающего через золотник, перекроет соответствующие отверстия и также остановится в заданном положении.
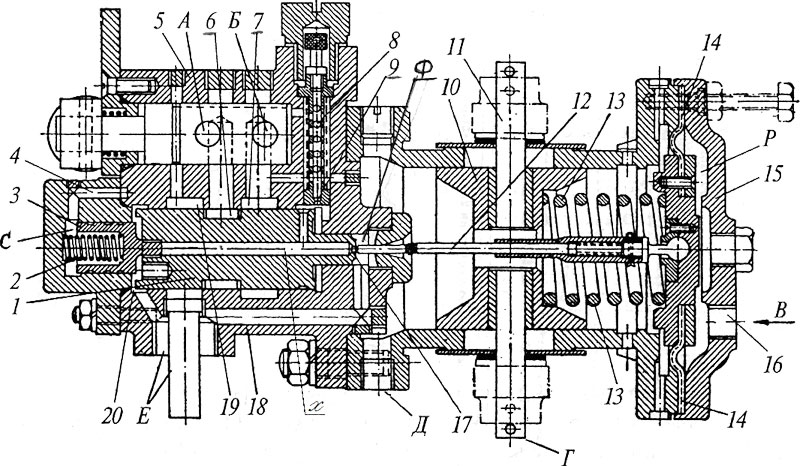
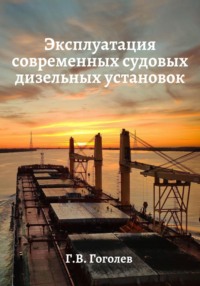
Рис 1.27. Телемотор-приемник «КаМеВа»: А – к вспомогательному сервомотору; Б – входное отверстие для масла под давлением; В – от телемотора-датчика шага; Г – к скользящей муфте масловвода; Д – утечное масло; Е – слив;1 – большой поршень золотника; 2 – пружина; 3 – малый поршень золотника; 4 – канал; 5 – корпус; 6 – кольцевая выточка; 7 – кольцевая выточка; 8 – фильтр; 9 – дроссельное отверстие; 10 – поршень; 11 – штырь; 12 – регулировочный штифт;13 – пружина; 14 – диафрагма; 15 – крышка телемотора-приемника;16 – отверстие подвода управляющего воздуха; 17 – отверстие; 18 – корпус телемотора-приемника; 19 – кольцевая выточка; 20 – кольцевая выточка.
При движении золотника в нос, масло под давлением будет проходить через отверстие в золотнике в кормовую часть гидравлического цилиндра и будет двигать поршень в нос до тех пор, пока пояски золотника не окажутся в нейтральном положении. При движении золотника в корму, поршень также двигается в корму.
При перекладках масло под давлением подаётся через золотник в одну из полостей гидроцилиндра по управляющей штанге 35, а слив масла из другой полости производится по кольцевому пространству между штангой 35 и сверлением вала 2.
Вспомогательный сервомотор 12, который через рычаг перемещает штангу 35 и золотник 34, управляется через телемотор-приемник изменения шага винта, который пневматически связан с рукояткой управления шагом.
Телемотор-приемник является одним из основных элементов в пневматической системе поворота лопастей.
Конструктивный чертёж пневмоприёмника приведён на рисунке 1.27. В корпусе 18 телемотора-приемника изменения шага винта, так же как и в корпусе телемотора-задатчика, имеются пружина 13 и диафрагма 14, нагруженная давлением управляющего воздуха, поступающего от телемотора-датчика.
Диафрагма 14 с регулировочным шрифтом 12, золотника, состоящего из двух поршней большого диаметра 1 и малого диаметра 3, штыря 11 – устройство обратной связи от вспомогательного сервомотора.
Диафрагма нагружена давлением управляющего воздуха со стороны «р» и пружиной 13, которая одним концом упирается в поршень 10. Площадь малого поршня 3 в два раза меньше площади большого поршня 1. Первый поршень управляет клапаном разгрузки (КР), а второй поршень регулирует поток масла, поступающего в полость вспомогательного сервомотора.
Масло к большому поршню золотника 1 поступает через встроенный фильтр 8. Далее силовое масло постоянно подводится к вспомогательному сервомотору, который связан со штангой управления разворотом лопастей ВРШ. Одновременно, через дроссельное отверстие 9, масло поступает в полость, со стороны которой создается давление на поршень 10, и в канал «х», откуда через отверстие 17, масло вытекает на слив E.
Поток масла через отверстие 17 дросселируется иглой штока 12, положение которого зависит от положения диафрагмы 14.
При её среднем положении истечение через отверстие 17 обеспечивает такое давление масла в полости «ф», которое, воздействуя на торцевую поверхность большого поршня золотника, уравновешивает усилия от давления масла со стороны полости «с» и пружины 2.
При необходимости изменения угла разворота ВРШ, переставляют рукоятку управления 6, при этом кулачная шайба 7 переместит шток задатчика шага 8. Изменится давление управляющего воздуха, который поступает к телемотору-приемнику (рис. 1.26).
Изменения давления управляющего воздуха на мембрану телемотора-приемника приведет к ее перемещению в нос либо в корму, при этом переместится клапанный штифт, который связан шарнирно с мембраной. Это увеличит либо уменьшит дроссельное отверстие гидравлической полости, что приведёт соответственно к уменьшению либо увеличению давления на площадь большого поршня телемотора приемника, оба поршня переместятся в носовую или кормовую часть судна. Кольцевая выточка 6 на поршне 1 частично совместится с выточкой 7 или выточкой 19 на корпусе 5 и масло поступит к сервомотору.
Поршень сервомотора сместится и через рычажную обратную связь передвинет штырь 11 и поршень 10. Затяжка пружины 13 изменится и диафрагма 14 вместе со штифтом 12 возвратится в первоначальное положение. После этого давление масла в камере «ф» также возрастёт или уменьшится и золотник возвратится в среднее положение, прекратив тем самым подачу масла к вспомогательному сервомотору.
В период маневра для его ускорения требуется увеличить подачу масла к механизму разворота ВРШ, для чего должен быть включен клапан разгрузки резервного масляного насоса. Это осуществляется поршнем 3 золотника путем перепуска масла от клапана разгрузки по каналам 4, по кольцевой выточке 20 в корпусе телемотора-приемника, по левой или правой кольцевой выточке на поршне 3 (в зависимости от стороны смещения) по каналам в сливную трубу «Е» (рис. 1.27).
После поступления масла во вспомогательный сервомотор 12, изменится положение маслораспределительного золотника 34 сервомотора поворотного устройства винта и обеспечит поворот лопастей в новое положение (рис. 2.26).
Давление масла создаётся шестеренным насосом 18, который приводится в действие через зубчатую передачу от гребного вала (на малых судах), или имеет независимый привод от электромотора (на больших судах).
Предусмотрен и небольшой пусковой маслонасос, приводимый в движение от электродвигателя и служащий для перевода лопастей в положение нулевого шага при запуске главного двигателя. Этот же насос может быть использован как аварийный при выходе из строя основного маслонасоса.
Для больших винтов устанавливают два насоса с электрическим приводом, один из которых (насос удержания) 17 постоянно подаёт масло под давлением, а второй (насос перекладки) 18 автоматически включается только во время маневра и в промежутках между перекладками выключен.
При перекладке лопастей масло при помощи маслонасоса 18 из основного маслобака 19 по трубопроводу 36 проходит в кольцевую выточку масловвода 4, уплотненную двумя кольцами и далее через сверление в гребном валу попадает внутрь управляющей штанги 35, а через маслораспределительный золотник 34 в одну из полостей гидравлического цилиндра. Давление масла в нагнетательной магистрали определяется затяжкой предохранительного клапана 5, который обычно регулируется на давление 1,8 МПа.
Масло, выходящее из ступицы, проходит по кольцевому пространству между штангой 35 и валом 2. Через сверление в валу и клапан 3, определяющий давление в сливной магистрали, масло поступает в маслобак 19, откуда насосом 24 подаётся в напорный бак 26 по мере понижения уровня в нём. Из маслобака 26 (при его наполнении) масло сливается в нижний маслобак 19. Напорный маслобак 26 служит для подпитки маслом картера масловвода при длительных ходах судна без перекладки лопастей винта.
Для предотвращения утечек масла из масловвода по концам последнего установлены специальные уплотнения. Незначительное количество масла, протекающего через концевые уплотнения, собирается в маслосборниках и по трубкам стекает в бак 19.
Пост управления шагом гребного винта и частотой вращения главного двигателя находится в рулевой рубке и представляет собой вертикальную колонку с двумя рукоятками. Для раздельного управления шагом винта и частотой вращения ГД или одной управляющей рукояткой, воздействующей через кулачки 7 и 37 на задатчики шага винта 8 и частоты вращения главного двигателя 38.
Колонка имеет сигнальную лампу, загорание которой сигнализирует о перегрузке ГД. На колонке управления размещены тахометр, указывающий частоту вращения винта, и прибор, указывающий положение лопастей.
Рассмотренная конструкция имеет хорошие массогабаритные показатели, из-за отсутствия массивной нагруженной штанги привода механизма поворота лопастей винта. Но она не лишена недостатков, к которым относятся:
• Большие масса и габариты винта с поворотными лопастями;
• Конструктивные трудности при обеспечении надежного уплотнения в линии подвода масла в МИШ;
• Невозможность проведения ремонтных работ и ревизии МИШ без постановки судна в дорогостоящий док.
1.4.2. Конструктивные схема ВРШ с МИШ в линии валопровода
Основное преимущество МИШ в линии валопровода состоит в том, что осмотр и ремонт механизма могут производится без постановки судна в док.
В большинстве отечественных проектов МИШ встроен в линию валопровода. По надежности такая конструкция удовлетворяет требованиям эксплуатации. На рыбопромысловых судах МИШ без ремонта работает по 30–50 тысяч часов.
Рассмотрим конструкции ВПЛ, гребного вала, МИШ и гидравлической системы винта регулируемого шага, предназначенного для рыболовного траулера.
Внутри ступицы ВПЛ расположен кулисный механизм, который преобразует возвратно-поступательное движение ползуна в поворотное движение лопастей.
Ползун в кормовой части опирается на шлицы шлицевой втулки, а в носовой части – на опорный подшипник. Шлицевая втулка воспринимает скручивающий момент ползуна и передаёт его на корпус ступицы. Внутри ползуна проходит стяжной болт для соединения со штангой. Ползун имеет два паза, в которых расположены сухари, в них входят кривошипные пальцы пальцевых шайб.
Комлевое уплотнение исключает износ как корпуса ступицы, так и комля винта (два бронзовых кольца уплотняются круглыми резиновыми манжетами).
Механизмы, расположенные в ВПЛ, смазываются маслом, поступающим из напорного маслобака системы смазки под давлением, обязательно, но незначительно превышающим давление забортной воды, для предотвращения проникновения забортной воды в ступицу и для предотвращения загрязнения маслом моря при большом перепаде. Необходимо контролировать перепад.
В ступице расположен компенсатор объема. Поршень компенсатора при перекладках лопастей вытесняет такой же объем как штанга гребного вала. Компенсатор обеспечивает ступице постоянный объем масла, что предотвращает образование вакуума и исключает подсос воды через уплотнения
Механизм изменения шага, создающий усилие для перекладки и удержания лопастей, встроен в линию валопровода (рис. 1.28). Основными узлами и деталями МИШ являются: вал МИШ 13 с гидроцилиндром 10, поршнем 11, кормовой стенкой 7, полумуфтой 4 и штангой 2, маслобукса 20 и гидроусилитель 24.

Рис. 1.28. Механизм изменения шага ВРШ: 1 – гребной вал; 2 – штанга гребного вала; 3 – стопор; 4 – полумуфта; 5 – стяжная гайка; 6 – подшипник; 7 – кормовая стенка; 8 – заглушка; 9 – пробка; 10 – цилиндр; 11 – поршень; 12 – пробка цилиндра; 13 – вал МИШ; 14 – гильза золотника; 15 – золотник; 16 – накидная гайка; 17 – маслосборник; 18 – штанга золотника; 19 – втулка масловвода; 20 – верхняя полубукса; 21 – пневмодатчик; 22 – телемотор; 23 – шкала указателя шага; 24 – гидроусилитель; 25 – вал коромысла; 26 – сливной патрубок; 27 – поводок; 28 – маслоотбойник; 29 – нижняя полубукса; 30 – коромысло; 31 – патрубок слива утечек; 32 – сухарь; 33 – ходовая гильза; 34 – масловвод; 35 – стопорная втулка; 36 – штуцер подвода масла; 37 – шарнир; 38 – вкладыш; 39 – манжета; 40 – упор; 41 – конический штифт; 42 – балансировочный груз; 43 – запорная шайба; 44 – гайка гребного вала; 45 – корпус манжеты; 46 – шпонка.
Поршень гидроцилиндра следует за распределительным золотником 15, положение которого задается системой дистанционного управления. Масло в цилиндр подается из маслобуксы 20 по каналам в штанге золотника 18. Маслобукса неподвижная, из двух половин, имеет проточки для подвода масла под давлением 36 и для отвода сливного масла 31. Маслобукса снабжена уплотнениями.
При перекладках золотник 15 перемещается относительно поршня. Масло от насоса направляется в соответствующую полость цилиндра. Поршень двигается в сторону золотника до тех пор, пока каналы между поршнем и золотником не перекроются и останутся только щели, через которые масло будет создавать минимальное давление, необходимое для удержания поршня на месте в заданном положении, и сбрасываться на слив.
Гидроусилитель 24 установлен для преобразования слабого пневмосигнала, получаемого телемотором в усилие, достаточное для перемещения распределительного золотника в поршне МИШ.
Управление ВРШ и дизелем осуществляется одной маневровой рукояткой с поста управления по следящей схеме, когда каждому положению рукоятки соответствует определенное сочетание шага и частоты вращения. Также как в описанной ранее схеме используются программные кулачки, пневмозадатчики, телемотор и вспомогательный сервомотор (гидроусилитель). Телемотор и гидроусилитель установлены на МИШ.
1.4.3. Эксплуатация установок с ВРШ
В состав установки ВРШ входят следующие основные элементы: гребной винт с поворотными лопастями, валопровод, механизм изменения шага, силовая часть системы управления, пост дистанционного управления.
Установка ВРШ эксплуатируется в соответствии с заводской инструкцией по эксплуатации и инструкцией по выбору режимов совместной работы ГД и ВРШ.
Подготовка ВРШ к действию производится по распоряжению старшего механика, одновременно подготавливаются электрооборудование и система аварийно-предупредительной сигнализации.
При подготовке установки ВРШ к действию после непродолжительного перерыва в работе (менее 48 часов без проведения ремонтных работ) необходимо [18]:
– произвести наружный осмотр узлов, механизмов и систем ВРШ;
– проверить уровень масла в напорной и циркуляционных цистернах и при необходимости их пополнить;
– проверить состояние масляных фильтров и при необходимости очистить;
– проверить установку клапанов и кранов в рабочее положение;
– проверить уровень масла в сточных цистернах и произвести откачку масла;
– подать в систему рабочий воздух;
– включить электропитание и систему управления, проверить ее исправность;
– проверить переключение постов управления;
– подготовить к действию насосы гидропривода поворота лопастей ВРШ и насосы системы смазки винта с поворотными лопастями (при их наличии), проверить создаваемое ими давление;
– провернуть гребной вал валоповоротным устройством на 2…3 оборота;
– произвести полную перекладку лопастей винта «вперед» и «назад» дистанционно и из машинного поста управления. Давление в системе гидропривода поворота лопастей и время поворота должно соответствовать заводской инструкции;
– проверить совпадение показаний выносного и местного указателей шагов;
– выставить «нулевой» разворот лопастей.
Если проверки успешны, то можно запускать ГД. В период работы ВРШ необходимо:
– контролировать уровни масла в цистернах. Снижение уровня свидетельствует об утечках, а повышение – о попадании в систему воды;
– контролировать давление масла в системе гидропривода поворота ВРШ в режиме удержания. Оно должно быть постоянным, а при перекладке лопастей не должно превышать предельных значений, указанных в инструкции;
– температура масла в системе гидравлического привода не должна превышать 60 °С, при температуре ниже 30 °С обеспечить подогрев;
– контролировать перепад давлений на фильтрах (предельный допустимый перепад обычно 0,2 МПа);
– производить анализ масла на наличие воды. Предельное содержание составляет 0,5 % воды;
– контролировать соответствие расхода масла нормам расхода, указанным в инструкции по эксплуатации;
– после длительных ходовых режимов без разворота лопастей при подходе к местам со сложными условиями плавания и перед швартовкой необходимо произвести контрольные повороты лопастей ВРШ в диапазоне с «Полного вперед» на «Полный назад» и обратно поочередно с каждого поста управления;
– пользоваться рекомендованным диапазоном поворота лопастей при маневрах и реверсах для исключения перегрузки ГД;
– регулярно удалять конденсат из емкостей сжатого воздуха и воздушных трубопроводов;
– производить очистку маслоохладителей (при их наличии) раз в месяц;
– следить за показаниями проборов, сигнальных ламп на постах управления ВРШ и в ЦПУ, срабатыванием защит, автоматического переключения главного насосного агрегата гидравлического привода поворота лопастей на резервный при падении давления масла;
– следить за отсутствием воздуха в гидравлических системах ВРШ, т. е. отсутствием резких ударов в трубопроводах и циркуляционных цистернах и отсутствием пены в напорных и циркуляционных цистернах;
– контролировать давление рабочей среды системы управления;
– контролировать наличие смазки в узлах и механизмах ВРШ;
– контролировать давление масла в системах смазки лопастей, охлаждения маслобукс до и после фильтров.
При выводе из действия установки ВРШ необходимо установить лопасти винта в положение нулевого упора, остановить двигатель и отсоединить валопровод от редуктора (при наличии). Если в дальнейшем не требуется поддержание ВРШ в готовности, следует продолжить прокачивать систему охлаждения маслобукс (при ее наличии) до температуры масла на выходе, указанной в инструкции (≈ до 30…35 °С), остановить основные и резервные насосы гидравлического привода и смазки поворотных лопастей, включить напорную систему смазки гидравлического привода поворота лопастей, вывести из действия систему управления, произвести проверку АПС, отключить электропитание, произвести наружный осмотр.
Характерные неисправности ВРШ и методы их устранения приводятся в заводской инструкции и в [10,18]. Основными причинами неисправностей являются: неисправности в системе управления (плохие контакты, обрыв цепи, попадание воды, грязи в электромагниты), утечки масла, подсос воздуха в систему, повреждения резиновых колец уплотнения МИШ, чрезмерный износ, механические повреждения лопастей обтекателя.
В случае отказа системы гидропривода поворота лопастей ВРШ, при падении давления масла, предусматриваются запирание полостей цилиндра при помощи обратных клапанов. Если зафиксированное таким образом положение лопастей не обеспечивает передний ход, то предусматривается возможность возвращения поршня сервомотора МИШ на передний ход при помощи отжимных болтов или расположенных в ступице пружин.
1.4.4. Конструкция и техническое использование крыльчатых движителей
При эксплуатации некоторых судов (плавучие краны, кабелеукладчики, буксиры, суда для подъема затонувших судов и других объектов) требуется столь точное позиционирование, что его невозможно будет достигнуть при помощи ВРШ, рулей и даже поворотных насадок. В этих случаях применяют крыльчатые движители (КД).
Крыльчатые движители одновременно выполняют функции движителя и руля. Они нашли достаточно широкое применение на кабелеукладчиках, судах для подъема затонувших объектов, портовых буксирах (особенно в портах Восточной Азии), на плавкранах («Черноморец», «Богатырь») а, также в меньшей степени, на тральщиках, рыболовецких судах, в качестве подруливающих устройствах. На голландском буксире «Multratug 32» применена более эффективная схема с разнесенными в нос и корму крыльчатками.
КД, кроме изменения шага, позволяет также менять направление упора относительно судна. КД представляет собой ротор, установленный заподлицо с днищем судна. По окружности ротора расположены лопасти, которые вращаются вместе с ротором и одновременно совершают колебательные движения вокруг собственных осей. Результирующей траекторией движения оси лопасти является циклоида. Движения лопастей осуществляются при помощимеханизма привода лопастей, который состоит из системы рычагов и тяг, расположенных внутри ротора. Эти колебательные движения происходят таким образом, что перпендикуляры, проведенные к хордам лопастей и проходящие через их центры, пересекаются приблизительно в одной точке, называемой центром управления (точка N на рис. 1.29).
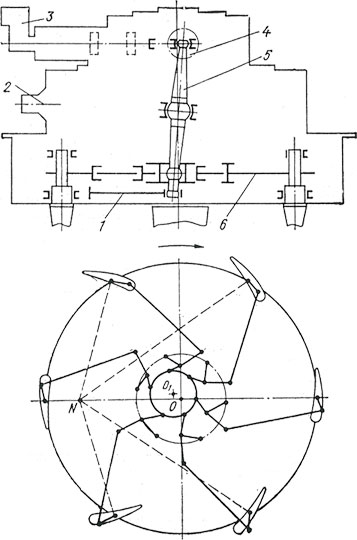
Рис. 1.29. Схема устройства крыльчатого движителя
Лопасти соединены системой рычагов и тяг механизма привода с управляющим диском, центр которого обозначен точкой О1. Положение центра управляющего диска определяет положение центра управления (точка N).
Крыльчатый движитель создает усилие упора в направлении, перпендикулярном линии, соединяющей центр ротора O с центром управления (точка N).
Когда центр управляющего диска совпадает с центром ротора, центр управления N находится в центре ротора, лопасти располагаются касательно к окружности и не имеют колебательного движения при вращении ротора. В этом случае упор движителя равен нулю. При увеличении эксцентриситета ОО1 точка N смещается из центра ротора. увеличиваются углы отклонения лопастей и упор движителя.
Управляющий диск перемещается и удерживается в заданном положении рулевым и ходовым сервомоторами при помощи управляющего рычага. С помощью ходового сервомотора управляющий диск смещается так, что центр управления перемещается по линии, нормальной к диаметральной плоскости (ДП) судна. При этом упор может изменяться от наибольшего значения, направленного к носу судна, до наибольшего, направленного к корме. Линия действия упора остается при этом параллельной диаметральной плоскости судна. Рулевой сервомотор позволяет получить упор, перпендикулярный ДП. С помощью комбинации движений рулевого и ходового сервомоторов можно получить любой упор от нуля до максимума и направить его в любом направлении по отношению к судну.
Подготовка движителя к работе начинается с осмотра и заполнения его рабочим маслом. После заполнения маслом необходимо прокачать его электронасосом в течение 15 минут, контролируя давление масла и температуру. Если температура масла в движителе ниже +10°С, то необходим его подогрев.
В период прокачки производится перекладка управляющего рычага, чтобы обеспечить попадание масла в места подвижных соединений. Ведущий вал движителя при этом проворачивают на один-два оборота ротора.
Далее производится контроль состояния системы охлаждения уплотнения вала ротора, чтобы предотвратить попадание забортной воды внутрь судна и вытекание рабочего масла из движителя. Количество подаваемой на уплотнение охлаждающей регулируется (приблизительно из расчета 1 л в минуту при полных оборотах ведущего вала движителя). В случае конструктивного исполнения с масляным подпором проверяется наличие масла в межманжетном пространстве уплотнения ротора.
Осуществляем пуск. Для движителей типа ДКК 20/5 время выхода масляного насоса на режим рабочего давления составляет не более 10 с от момента запуска движителя. При частоте вращения ведущего вала до 220 об/мин давление смазочного масла может быть меньше нормального (1,7–2,5 бар), но не ниже 0,5 бар.
Управление режимом работы КД, производится дистанционно из рубки судна.
Перекладка рычагов поста (т. е. управление сервомоторами) должна производиться так, чтобы исключалась возможность перегрузки приводного двигателя.
Для удобства управления движителями и судном рычаги управления ходовых и рулевых сервомоторов движителей левого и правого бортов блокируют для совместного управления.
Ход лагом получают, осуществляя раздельное управление ходовыми сервомоторами движителя левого и правого бортов. Направление и относительную величину упора можно проконтролировать по диаграмме, расположенной на верхнем корпусе движителя.